tactile sensor
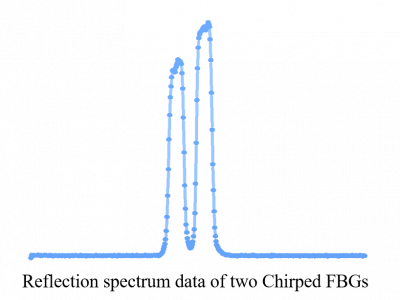
1.The spectrum of the dataset is obtained by applying force to the tactile sensor based on Chirped Bragg gratings.
2.The applied force ranges from 0N to 10N on the sensing pad of 4cm×4cm.
3.The folder name (x, y) represents the specific coordinates of the point at which the force is applied, and the xN name of the subfolder represents the xN force applied at that point.
4.A total of 120 spectral data were collected in each applied force state.
5.The first column of each spectrum is wavelength and the second column is intensity.
- Categories:
 145 Views
145 Views
A feature extraction algorithm for texture detection oriented to its implementation on embedded electronics based on a Field-Programmable Gate Array (FPGA) is proposed in this paper.
- Categories:
108 Views