Dynamics
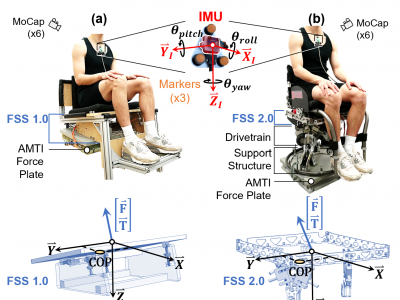
This data was collected during a validation study of our Torso-Dynamics Estimation System (TES). The TES consisted of a Force Sensing Seat (FSS) and an inertial measurement unit (IMU) that measured the kinetics and kinematics of the subject's torso motions. The FSS estimated the 3D forces, 3D moments, and 2D COPs while the IMU estimated the 3D torso angles. To validate the TES, the FSS and IMU estimates were compared to gold standard research equipment (AMTI force plate and Qualisys motion capture system, respectively).
- Categories:
 86 Views
86 Views
We design a computer program that can output reduced dynamics for odd integers with 4k+3, e.g, [3-99999999]. Outputting (reduced) dynamics for much larger integers are also possible. The source code in C is txpo9.c. There are 5 options in arguments for more flexible output. Those data can reveal the properties of reduced dynamics. The most important are ratio and period.
- Categories:
204 Views