Mechanical Sensing

Comparative measurements between a digital acquisition system and an analog acquisition system, namely National Instruments CompactRIO.
The dataset includes the measurements of a 10-days accelerated test performed on a tapered bearing (12 rolling elements) mounted on a motor test bench, from the brand-new condition until failure. The test bench was working at 2400 revolution per minute (RPM), and the bearing was preloaded with 4000 N.
- Categories:
 30 Views
30 Views
Normal
0
14
false
false
false
IT
X-NONE
X-NONE
- Categories:
34 Views
The Partial Discharge - Localisation Dataset, abbreviated: PD-Loc Dataset is an extensive collection of acoustic data specifically curated for the advancement of Partial Discharge (PD) localisation techniques within electrical machinery. Developed using a precision-engineered 32-sensor acoustic array, this dataset encompasses a wide array of signals, including chirps, white Gaussian noise, and PD signals.
- Categories:
115 Views
New capabilities involving sensors, data collection, and data analysis have enabled innovations in how engineered systems are monitored and maintained. Whereas each new evolution of maintenance philosophies has relied upon the current technological state, this research examines potential future capabilities in the field of prognostics and health management (PHM). PHM algorithms for predicting the estimated time to failure for a system are based on sensor data, physical models, or a combination of both.
- Categories:
32 Views
The data includes the spatial performance of a compliant large-area tactile sensor for hands-on detection.
- Categories:
29 Views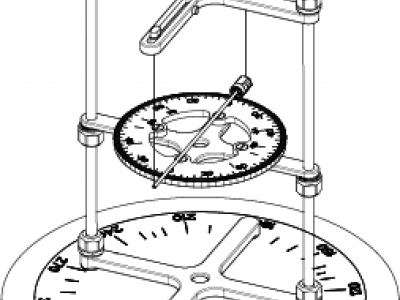
Use of medical devices in the magnetic resonance environment is regulated by standards that include the ASTM-F2213 magnetically induced torque. This standard prescribes five tests. However, none can be directly applied to measure very low torques of slender lightweight devices such as needles. Methods: We present a variant of an ASTM torsional spring method that makes a “spring” of 2 strings that suspend the needle by its ends. The magnetically induced torque on the needle causes it to rotate. The strings tilt and lift the needle.
- Categories:
170 Views
We use industrial cameras to take images of steel wire ropes under different conditions. We put the images of steel wire ropes in five folders, named as:Camera position step up_1; Camera position step up_2; From dark to light; Rotate(360 degrees); Rotate(360 degrees). Images in different folders come from different sources, explained below: Camera position step up_1:Move the camera from bottom to top to obtain images of different positions of the wire rope.
- Categories:
58 Views
This paper presents an active disturbance rejection torque control strategy integrated with a Kalman filter for a pneumatic rotary actuator without pressure feedback. The interference from the position system and nonlinearity from friction and air compressibility can lead to chatter and crawl, presenting challenges to achieving precise torque control of pneumatic rotary actuators. A Kalman filter is designed for real-time filtering to address the chattering of active disturbance rejection controller (ADRC) caused by noise of feedback signal.
- Categories:
34 Views
This is the data of an innovative microstepping motor controller with excitation angular current double-loop feedback control (ACDL), and compared with the data of a conventional stepper motor controller (OP) and angle closed-loop control (AL).
- Categories:
47 Views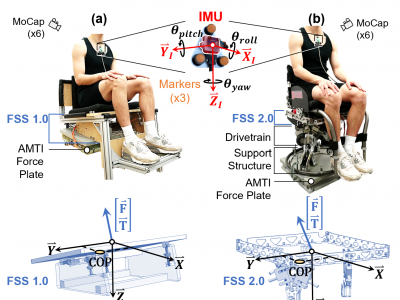
This data was collected during a validation study of our Torso-Dynamics Estimation System (TES). The TES consisted of a Force Sensing Seat (FSS) and an inertial measurement unit (IMU) that measured the kinetics and kinematics of the subject's torso motions. The FSS estimated the 3D forces, 3D moments, and 2D COPs while the IMU estimated the 3D torso angles. To validate the TES, the FSS and IMU estimates were compared to gold standard research equipment (AMTI force plate and Qualisys motion capture system, respectively).
- Categories:
86 Views