Sensors

This is the dataset for the letter "NLOS Mitigation Using Residual-Weighted Least-Squares in Wireless Localization"
- Categories:
 105 Views
105 Views
Eight participants, sat on a stable chair with no arm rests and a high backrest, with his/her right arm strapped to the passive manipulator. The participant’s motion was simultaneously recorded using a Kinect sensor, an electronic goniometer (Biopac Systems, USA), and a passive marker motion capture system, V120:Trio (OptiTrack, USA). The Kinect sensor was placed 2 m in front and slightly above the participant. The goniometer was attached, using double-sided tape, to the participant’s arm above the elbow. Three reflective markers were used for the V120:Trio recording.
- Categories:
175 Views
# RSS data from smartwatch for Contact Tracing
This dataset was collected for the purpose to understand the proximity between any two smartwatches worn by human.
We used the Google's Wear OS based smartwatch, powered by a Qualcomm Snapdragon Wear 3100 processor, from Fossil sport to collect the data.
The smartwatch is powered by a Qualcomm Snapdragon Wear 3100 processor and has an internal memory of up to 1GB.
Two volunteers were required to wear the smartwatch on different hand and stand at a certain distance from each other.
- Categories:
671 Views
This file contains VLC RSSI data from the IoRL Measurement campaign.
The processing files included are developed by Ben Meunier from Brunel University London.
- Categories:
251 Views
This dataset presents both raw and processed data from testing of two SMF-28 Ultra fibers heated up to 1000 deg. C. The data was collected using an OBR 4600. Benchmark temperatures were collected using thermocouples co-located at points along the fiber. See Readme file.
- Categories:
134 Views
<p>The proliferation of efficient edge computing has enabled a paradigm shift of how we monitor and interpret urban air quality. Coupled with the dense spatiotemporal resolution realized from large-scale wireless sensor networks, we can achieve highly accurate realtime local inference of airborne pollutants. In this paper, we introduce a novel Deep Neural Network architecture targeted at latent time-series regression tasks from continuous, exogenous sensor measurements, based on the Transformer encoder scheme and designed for deployment on low-cost power-efficient edge processors.
- Categories:
1044 Views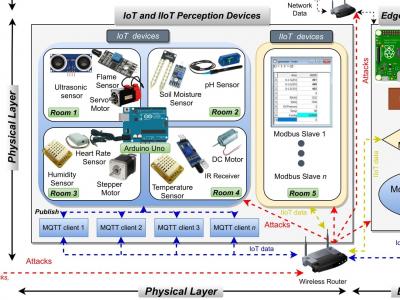
In this project, we propose a new comprehensive realistic cyber security dataset of IoT and IIoT applications, called Edge-IIoTset, which can be used by machine learning-based intrusion detection systems in two different modes, namely, centralized and federated learning. Specifically, the proposed testbed is organized into seven layers, including, Cloud Computing Layer, Network Functions Virtualization Layer, Blockchain Network Layer, Fog Computing Layer, Software-Defined Networking Layer, Edge Computing Layer, and IoT and IIoT Perception Layer.
- Categories:
13739 Views
These data is used to test the performance of the proposed in-motion inital alignment method.
These data includes the raw data of inertial measurement units, the raw data of GPS and the reference attitude angles.
All these data is simulated.
The frequency of inertial measurement units and GPS are 100Hz and 1Hz, respectively.
The data are explained below:
imu=[gryo;acc;time] Unit is rad; m/s; s
GPS=[lat;lon;height;ve;vn;vu]; Unit is rad; rad; m; m/s; m/s; m/s
Ref_angle=[pitch;roll;yaw]; Unit is rad; rad; rad
- Categories:
77 Views
This dataset consists of the training and the evaluation datasets for the LiDAR-based maritime environment perception presented in our journal publication "Maritime Environment Perception based on Deep Learning." Within the datasets, LiDAR raw data are processed using Deep Neural Networks (DNN). In the training dataset, we introduce the method for generating training data in Gazebo simulation. In the evaluation datasets, we provide the real-world tests conducted by two research vessels, respectively.
- Categories:
1274 Views
There exist several commonly used datasets in relation to object detection that include COCO (with multiple versions) and ImageNet containing large annotations for 80 and 1000 objects (i.e. classes) respectively. However, very limited datasets are available comprising specific objects identified by visually imapeired people (VIP) such as wheel-bins, trash-Bags, e-Scooters, advertising boards, and bollard. Furthermore, the annotations for these objects are not available in existing sources.
- Categories:
86 Views