Transportation

We propose a novel high-resolution dataset named, “Dataset for Indian Road Scenarios (DIRS21)” for developing perception systems for advanced driver assistance systems.
- Categories:
 3716 Views
3716 Views
We design a solution to achieve coordinated localization between two unmanned aerial vehicles (UAVs) using radio and camera perception. We achieve the localization between the UAVs in the context of solving the problem of UAV Global Positioning System (GPS) failure or its unavailability. Our approach allows one UAV with a functional GPS unit to coordinate the localization of another UAV with a compromised or missing GPS system. Our solution for localization uses a sensor fusion and coordinated wireless communication approach.
- Categories:
432 Views
his corpus was approved by Air Traffic Management Bureau, Civil Aviation Administration of China (CAAC). All speech had been recorded by real radiotelephony between air traffic controllers (ATCs) and pilots from December 15, 2020 to January 14, 2021. The raw data comprised around 700,000 segments of ATCs speech involving all work stations over 3 daily periods (0200–0700, 1000–1200 and 1330–1530 hours). Finally, seven controllers with different genders, age groups, controller levels and control positions were identified, namely ATCs_1 to ATCs_7.
- Categories:
505 Views
- Categories:
215 Views
In this appendix, the tested implementation in Matlab of our 2D-TDOA localization algorithm is given for the easier repetition of the obtained results and the future hardware implementation, due to the complexity of the formulas (25)-(31).
- Categories:
429 Views
This dataset inludes a nonlinear disturbance observer (NDOB)-based controller for attitude and altitude control of a quadrotor. The NDOB is used to estimate and compensate disturbances that are imposed naturally on the quadrotor due to aerodynamics and parameter uncertainties. It is demonstrated herein that the proposed observer can estimate external disturbances asymptotically.
- Categories:
497 Views
This dataset is based on the ACFR Five Roundabouts Dataset. The original tracking data of over 23,000 traffic vehicles have been processed with an optimization-based filtering method to combat measurement noise and errors. Smooth velocity and acceleration signals are reconstructed. The processed recordings have then undergone a selection process using DBSCAN to remove the erroneous samples. The remaining samples contained in this dataset are considered representative of how average human drivers approach a roundabout scenario in daily driving.
- Categories:
376 Views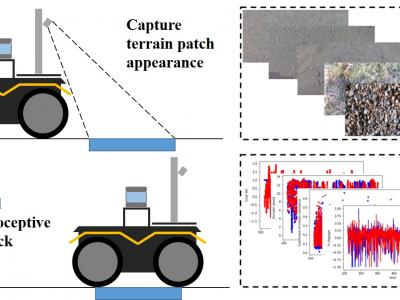
The Jackal UGV, from Clearpath Robotics, was used as the data collecting platform. This skid-steer four-wheel-drive vehicle comes with an onboard IMU, two DC motors with encoders that measure wheel angular speeds, and current sensors that measure motor current outputs. On each side of the robot, the front wheel and back wheel are jointed with a gearbox and so spin together at the same rate and direction. The IMU provided vehicle attitude measurements in terms of Euler angles, as well as linear acceleration and angular rate of the vehicle body in three Euclidean axes.
- Categories:
994 Views
Extensive experimental measurement campaigns of more than 30,000 data points of end-to-end latency measurements for the following network architecture schemes is available:
- Unlicensed IoT (standalone LoRa)
- Cellular IoT (standalone LTE-M)
- Concatenated IoT (LoRa interfaced with LTE-M)
Download Data.zip to access all relevant files for the open data measurements.
Related Paper:
- Categories:
2596 Views
Exit Advance Guide Signs play an important role in driving safety on highway tunnels. With the increase of mountain highway in recent 10 years, how to set exit advance guide signs inside the mountain highway tunnels become a new problem in China. The paper highlighted the influence of exit advance guide signs on the driver’s eye movement in the mountainous highway tunnel.
- Categories:
290 Views