Transportation
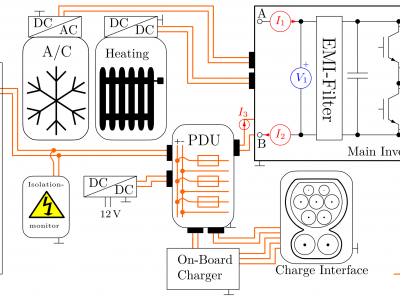
The dataset contains high bandwidth voltage and current measurements of the main inverter of an electric vehicle. They were acquired from a Mercedes-Benz E-Vito on a testing ground in many different Operation Points (OP) listed in the following table:
- Categories:
 1116 Views
1116 Views
The proposed dataset, termed PC-Urban (Urban Point Cloud), is captured with an Ouster LiDAR sensor with 64 channels. The sensor is installed on an SUV that drives through the downtown of Perth, Western Australia (WA), Australia. The dataset comprises over 4.3 billion points captured for 66K sensor frames. The labelled data is organized as registered and raw point cloud frames, where the former has a different number of registered consecutive frames. We provide 25 class labels in the dataset covering 23 million points and 5K instances.
- Categories:
2310 Views
This dataset contains road networks used in experiments for DRL-Router, including Sioux Falls, Anaheim, Winnipeg and Barcelona.
- Categories:
208 Views
The dataset collects the results of a survey of 325 respondents. Each respondent is asked to design a route from an origin to a destination taking into account the following considerations:
- The route should avoid crowds to avoid getting COVID-19.
- They should take into account the context provided: day, time, month, holiday period.
A total of 10 scenarios located in the city of Ciudad Real were designed.
- Categories:
524 Views
Another raw ADS-B signal dataset with labels, the dataset is captured using a BladeRF2 SDR receiver @ 1090MHz with a sample rate of 10MHz
- Categories:
3416 Views
This dataset represents a subnetwork of public transportation in the city of Johannesburg. It contains counting of bus occupation of three significant routes as well as GPS location of Bus stations.
- Categories:
404 Views
This dataset is in support of my research paper 'Design and Analysis of 2kW Residential PEM Fuel Cell Inverter '.
Preprint :
- Categories:
3656 Views
This dataset is in support of my 2 research papers ' '.
Preprint :
- Part I :
- Part II :
Related Claim : Novel ß Non-Linear Theory, Novel ß Inverter and Novel ß PFC in Patent 'Novel ß 10-Axis Grid Compatible Multi-Controller'
- Categories:
1653 Views
Both passenger demand and service supply are among the most important factors that determine the performance of urban rail transit system. It is not easy to find out optimal solution for the match between the passenger demand and service supply with traditional methods, due to the complexity of the combinatorial intelligent supply — demand matching problem. In order to get the comprehensively optimal matching degree, this paper transforms the multi-criteria problem into the distributed artificial intelligence optimization by using multi-agent dynamic interaction technique.
- Categories:
347 Views
This dataset is released with our research paper titled “Scene-graph Augmented Data-driven Risk Assessment of Autonomous Vehicle Decisions” (https://arxiv.org/abs/2009.06435). In this paper, we propose a novel data-driven approach that uses scene-graphs as intermediate representations for modeling the subjective risk of driving maneuvers. Our approach includes a Multi-Relation Graph Convolution Network, a Long-Short Term Memory Network, and attention layers.
- Categories:
2697 Views