Sensors

This dataset was collected from force, current, angle (magnetic rotary encoder), and inertial sensors of the NAO humanoid robot while walking on Vinyl, Gravel, Wood, Concrete, Artificial grass, and Asphalt without a slope and while walking on Vinyl, Gravel, and Wood with a slope of 2 degrees. In total, counting all different axes and components of each sensor, we monitored 27 parameters on-board of the robot.
- Categories:
 216 Views
216 Views
GesHome dataset consists of 18 hand gestures from 20 non-professional subjects with various ages and occupation. The participant performed 50 times for each gesture in 5 days. Thus, GesHome consists of 18000 gesture samples in total. Using embedded accelerometer and gyroscope, we take 3-axial linear acceleration and 3-axial angular velocity with frequency equals to 25Hz. The experiments have been video-recorded to label the data manually using ELan tool.
- Categories:
689 Views
The current maturity of autonomous underwater vehicles (AUVs) has made their deployment practical and cost-effective, such that many scientific, industrial and military applications now include AUV operations. However, the logistical difficulties and high costs of operating at-sea are still critical limiting factors in further technology development, the benchmarking of new techniques and the reproducibility of research results. To overcome this problem, we present a freely available dataset suitable to test control, navigation, sensor processing algorithms and others tasks.
- Categories:
3034 Views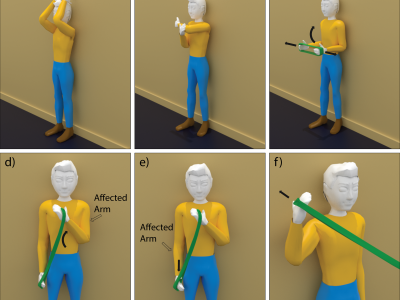
Shoulder Physiotherapy Activity Recognition 9-Axis Dataset (SPARS9x)
Suggested uses of this dataset include performing supervised classification analysis of physiotherapy exercises, or to perform out-of-distribution detection analysis with unlabeled activities of daily living data.
Description:
- Categories:
1401 Views
The dataset is composed of digital signals obtained from a capacitive sensor electrodes that are immersed in water or in oil. Each signal, stored in one row, is composed of 10 consecutive intensity values and a label in the last column. The label is +1 for a water-immersed sensor electrode and -1 for an oil-immersed sensor electrode. This dataset should be used to train a classifier to infer the type of material in which an electrode is immersed in (water or oil), given a sample signal composed of 10 consecutive values.
- Categories:
1901 Views
Experimental results of sensors in different directions
- Categories:
80 Views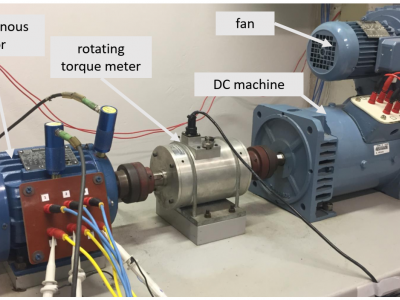
The data set contains electrical and mechanical signals from experiments on three-phase induction motors. The experimental tests were carried out for different mechanical loads on the induction motor axis and different severities of broken bar defects in the motor rotor, including data regarding the rotor without defects. Ten repetitions were performed for each experimental condition.
- Categories:
20166 Views
In order to test the performance of the proposed sensor, the measurement error of the original sensor is tested.In addition, error test, stability test and repeatability test are carried out for the optimized sensor.
- Categories:
123 Views
Robotic Vision
- Categories:
142 Views
For Lissajous scanning the synchronization of both axis is crucial. The laser beam is deflected vertically by the first MEMS mirror, redirected to the second mirror and deflected horizontally. In the proposed master slave concept, the synchronization controller Φ compensates for relative phase errors by duty cycle adjustments while individual PLLs keep each MEMS mirror stabilized. This videos show how the projected grid and center pixel drifts if the synchroniaztion controller between both MEMS mirrors with individual PLLs is turned off.
- Categories:
161 Views